Conheça o Jellyphant, um braço robótico flexível, inspirado na tromba do elefante, capaz de agarrar objetos
Autores
Jovens revisores

Resumo
Muitas espécies de animais, como os elefantes e os polvos, são capazes de alterar a rigidez de seus tentáculos e trombas. Isso lhes permite se mover em seus ambientes, bem como agarrar e mover objetos. Adoraríamos que nossos robôs macios pudessem fazer o mesmo! Isso pode ser feito usando uma técnica chamada jamming, na qual os materiais na tromba são compactados para alterar sua rigidez. O jamming tem sido usado em todos os tipos de robôs macios (também chamados de “flexíveis”), como mãos robóticas para pegar frutas e verduras delicadamente, trajes de exoesqueleto e instrumentos cirúrgicos. Neste artigo, falaremos sobre os três principais tipos de jamming usados na robótica macia e mostraremos como eles podem ser usados na vida real. E adivinhem? No final do artigo, descreveremos o uso do jamming para construir uma tromba de elefante robótica que pode alterar sua rigidez, assim como a tromba de um elefante real!
O que são os robôs macios?
A robótica macia é um campo em que os robôs são feitos de materiais macios, em vez de rígidos. Os pesquisadores da robótica macia utilizam materiais como silicone, borrachas e géis, que permitem que os robôs mudem de forma, de forma semelhante à capacidade dos seres vivos para se dobrarem e se esticarem. Pense no Baymax, o simpático robô inflável, destinado a tarefas de saúde, que aparece no filme “Operação Big Hero”: esse é um robô macio!
Alguns dos robôs macios mais úteis se baseiam em animais reais. Portanto, os robôs macios precisam copiar o que os animais reais podem fazer. Isso significa ser flexível para que possam se mover bem, pegar objetos e interagir com o mundo. Por exemplo, um tentáculo de polvo ou uma tromba de elefante não possuem ossos, mas podem ficar rígidos quando necessário.
Pense em um elefante pegando comida com sua tromba (Figura 1) [1]. A tromba de um elefante é composta por mais de 90 mil feixes de fibras musculares, que proporcionam um controle preciso para coletar comida [2] e usar ferramentas (como um galho) para coçar seu corpo [3]. A complexa rede de músculos trabalha em conjunto, relaxando e contraindo, para produzir forças que movem a tromba. As pontas de suas trombas são dotadas de características semelhantes a dedos, que podem endurecer para agarrar a comida antes de levá-la à boca [4].
Na robótica macia, usamos um método chamado jamming, um processo que permite controlar a rigidez, para permitir que os robôs se tornem mais duros, de forma semelhante ao que os elefantes conseguem fazer com suas trombas.

Uma Breve Introdução ao jamming
O jamming permite que os robôs mudem de forma e de rigidez. O robô pode ser desbloqueado, o que o torna flexível para se movimentar e explorar, ou bloqueado, o que o torna rígido e ótimo para agarrar. A seguir, explicaremos como funcionam os métodos de jamming mais populares. Em seguida, colocaremos a teoria em prática e descreveremos como fazer uma tromba de elefante macia!
Jamming Granulado
Imagine que você está no supermercado e pega um saco de feijão embalado a vácuo. Ele parece duro e rígido, com todos os grãos compactados em um bloco sólido. Feijões e outros grãos vendidos em supermercados podem ser selados a vácuo para garantir uma vida útil mais longa. Isso é feito removendo o ar de dentro da embalagem para evitar o crescimento de bactérias e reduzir o tamanho da embalagem para transporte e armazenamento.
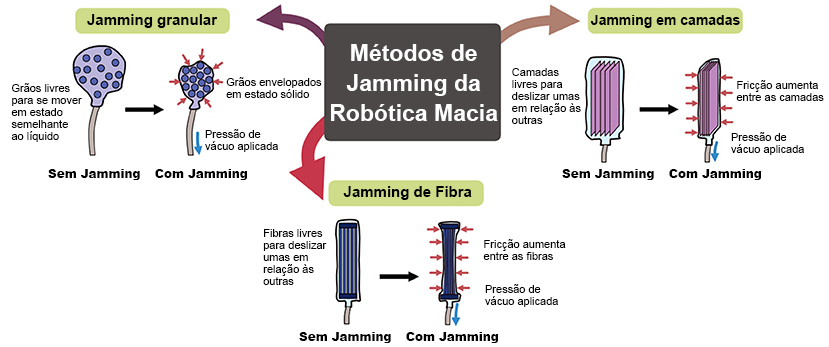
Após comprar os grãos, você decide rasgar o saco. O lacre que segura o vácuo é quebrado e o ar retorna para o saco. O saco parece muito mais compressível, e os grãos podem se mover livremente, mudando de lugar dentro do saco quando você o aperta. Esse fenômeno é conhecido como jamming granular, um processo pelo qual partículas granulares na membrana se compactam e passam de um estado fluido para um estado sólido após a aplicação de vácuo, no qual materiais particulados como pó de café, feijão, arroz, cascalho e areia podem mudar reversivelmente de um estado fluido para um estado sólido quando uma pressão é aplicada [5]. Quando as substâncias granulares podem fluir livremente, o robô fica macio e flexível. No entanto, quando uma pressão de vácuo é aplicada, esses grãos são comprimidos por uma membrana e não têm para onde se mover e, portanto, formam uma estrutura sólida.
Jamming de Camadas
Você pode imaginar o jamming de camadas, um processo pelo qual uma pilha de camadas planas ou folhas envoltas em uma membrana são comprimidas após a aplicação de vácuo, como fazer um sanduíche! Em vez de usar pão comum, usamos materiais planos, como pilhas de papel ou folhas de plástico. Colocamos essas camadas em um envelope ou saco, semelhante a embrulhar um sanduíche. Se você não embrulhar seu sanduíche firmemente, os ingredientes de dentro podem vazar, então a embalagem precisa ser firme o suficiente para mantê-los no lugar. É isso que fazemos no jamming de camadas — comprimimos essas camadas juntas usando vácuo, para criar uma estrutura rígida e impedir que as camadas deslizem umas contra as outras. Quando liberadas (sob pressão normal), as camadas ficam livres para deslizar e se mover umas contra as outras, porque ainda há espaços de ar entre elas (Figura 2).
No entanto, uma vez que o vácuo é aplicado para comprimir a estrutura, o ar é sugado para fora e o envelope força as camadas a se unirem, comprimindo a estrutura em “sanduíche”. O espaço entre as camadas, que antes era ocupado por ar, diminui e as camadas se compactam firmemente. À medida que mais pressão de vácuo é aplicada, as camadas se aproximam cada vez mais, e a área de contato aumenta. O atrito entre as camadas, portanto, impede que deslizem uma contra a outra, e isso imobiliza toda a estrutura. Então, a estrutura torna-se totalmente rígida, como um bloco sólido, difícil de dobrar.
Jamming de Fibras
As estruturas produzidas usando Jamming de Fibras utilizam feixes de fibras encerrados dentro de um envelope cilíndrico (Figura 2). São semelhantes às fibras musculares envoltas por bainhas de tecido conjuntivo. Essas fibras podem ser feitas de materiais como plástico, silicone, algodão e até mesmo couro [6]. Quando desobstruídas (à pressão normal), as fibras do feixe deslizam livremente umas contra as outras. No entanto, quando o vácuo é utilizado para remover todo o ar, essas fibras são forçadas a se unirem dentro do envelope, o que aumenta a área de contato e o atrito entre as fibras e, consequentemente, aumenta sua rigidez. Isso é semelhante à forma como os músculos do braço humano se contraem e enrijecem quando levantamos algo pesado.
O Jellyphant: uma tromba de elefante feita com o jamming granular
Agora, explicaremos como construímos um robô simples e flexível baseado em Jamming (Figura 3A). Neste caso, utilizamos o Jamming granular para construir um robô flexível que imita algumas características da tromba de um elefante. O Jamming já foi usado anteriormente para criar robôs semelhantes a trombas, com liberdade para se mover em várias direções [7–10]. Além disso, sistemas de Jamming granular podem frequentemente ser replicados em casa, usando grãos facilmente disponíveis e um pouco de criatividade (ou impressão 3D, se você tiver a sorte de possuir uma impressora!). A membrana pode ser um balão ou algumas voltas de filme plástico.

(b) Os materiais usados para construir o Jellyphant.
Como podíamos dar qualquer nome que quiséssemos a esta tromba artificial, decidimos chamá-la de Jellyphant (uma junção das palavras GELEIA e ELEFANTE em inglês). O Jellyphant foi construído com um esqueleto flexível, grãos de cevada e uma capa plástica (Figura 3B). Ao contrário das trombas de elefante reais, que não possuem ossos ou cartilagem, alguns robôs flexíveis ainda precisam de suporte estrutural para evitar um fenômeno chamado flambagem, que é uma curvatura indesejada.
Robôs flexíveis costumam ser propensos a flambagem quando tentam suportar peso. Assim como no Jellyphant, uma estrutura de suporte, como um esqueleto flexível, é frequentemente necessária para manter a forma geral do robô flexível, garantindo que seu corpo não fique muito flácido. O esqueleto é composto por placas plásticas rígidas com espaçadores e um tubo de vácuo inserido em seu centro. O tubo de vácuo é conectado a um aspirador de pó doméstico por meio de um pequeno bocal. Uma capa plástica foi então esticada sobre o esqueleto e preenchida com grãos de cevada.
Em seu estado desobstruído, o Jellyphant é macio e flexível, pois os grãos podem se mover e se deslocar dentro da membrana e ao redor das placas do esqueleto. Nesse estado, o Jellyphant pode ser facilmente deformado com pouca força. No entanto, quando o aspirador é ligado e a estrutura é bloqueada, ela se torna rígida e pode agarrar objetos. A Figura 3A mostra o Jellyphant agarrando itens domésticos como um garfo, uma caneta ou um pedaço de papelão! Isso é possível porque, ao sugar o ar, os grãos se compactam firmemente ao redor do objeto, fixando-o no lugar.
Conclusão
Em um robô de rigidez variável, um estado de flexibilidade é útil para tarefas delicadas, mantendo as pessoas ao redor do robô seguras e evitando danos à máquina. Por outro lado, um estado rígido é útil para o robô levantar objetos pesados e manter uma forma específica. Em resumo, robôs flexíveis são muito versáteis e podem mudar suas formas e funções com mais facilidade do que robôs rígidos tradicionais. No futuro, o Jellyphant poderá ser ampliado para criar um robô maior, que poderá ser usado para auxiliar em cirurgias médicas. Como esses robôs são flexíveis, podem se mover facilmente em espaços apertados e são menos propensos a causar danos ao corpo humano. São chamados de robôs contínuos, com muitas articulações que permitem que se dobrem e se torçam como animais, e podem ser controlados por fios ou cabos conectados a motores, como uma espécie de marionete.
A robótica flexível é um campo promissor que está remodelando a maneira como entendemos, construímos e interagimos com robôs, e tem o potencial de melhorar a vida humana. O futuro dos robôs macios parece bastante “sólido”!
Glossário
Robótica Macia: Uma área da robótica que estuda o projeto, a criação e o controle de robôs feitos de materiais flexíveis.
Jamming: Um processo que permite rigidez controlável em robótica macia.
Jamming Granular: Um processo pelo qual partículas granulares em uma membrana se compactam e passam de um estado fluido para um estado sólido após a aplicação de vácuo.
Jamming de Camadas: Um processo pelo qual uma pilha de camadas ou folhas planas contidas em uma membrana são comprimidas após a aplicação de vácuo.
Atrito: Uma força que resiste ao movimento de duas superfícies deslizando uma contra a outra.
Jamming de Fibras: Um processo pelo qual um feixe de fibras em uma membrana passa de um feixe flexível para rígido após a aplicação de vácuo.
Robôs Contínuos: Robôs longos e contínuos, com muitas articulações que permitem que se dobrem e se torçam como animais.
Referências
[1] Manti, M., Cacucciolo, V., e Cianchetti, M. 2016. Stiffening in soft robotics: a review of the state of the art. IEEE Robot. Autom. Magaz. 23, 93–106. doi: 10.1109/MRA.2016.2582718
[2] Longren, L. L., Eigen, L., Shubitidze, A., Lieschnegg, O., Baum, D., Nyakatura, J. A., et al. 2023. Dense reconstruction of elephant trunk musculature. Curr. Biol. 33, 4713–4720.e3 doi: 10.1016/j.cub.2023.09.007
[3] Chevalier-Skolnikoff, S., e Liska, J. 1993. Tool use by wild and captive elephants. Animal Behav. 46, 209–219. doi: 10.1006/anbe.1993.1183
[4] Wu, J., Zhao, Y., Zhang, Y., Shumate, D., Braccini Slade, S., Franklin, S. V., et al. 2018. Elephant trunks form joints to squeeze together small objects. J. R. Soc. Interface 15, 20180377. doi: 10.1098/rsif.2018.0377
[5] Fitzgerald, S. G., Delaney, G. W., e Howard, D. 2020. “A review of jamming actuation in soft robotics”, in Actuators (Basel: MDPI), 104.
[6] Brancadoro, M., Manti, M., Tognarelli, S., e Cianchetti, M. 2018. “Preliminary experimental study on variable stiffness structures based on fiber jamming for soft robots”, in 2018 IEEE International Conference on Soft Robotics (RoboSoft) (Livorno: IEEE), 258–263.
[7] Clark, A. B., e Rojas, N. 2019. “Stiffness-tuneable limb segment with flexible spine for malleable robots”, in 2019 International Conference on Robotics and Automation (ICRA) (Montreal, QC: IEEE), 3969–3975.
[8] Santiago, J. L. C., Godage, I. S., Gonthina, P., e Walker, I. D. 2016. Soft robots and kangaroo tails: modulating compliance in continuum structures through mechanical layer jamming. Soft Robot. 3, 54–63. doi: 10.1089/soro.2015.0021
[9] Kim, Y. J., Cheng, S., Kim, S., e Iagnemma, K. 2012. “Design of a tubular snake-like manipulator with stiffening capability by layer jamming”, in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (Vilamoura-Algarve: IEEE), 4251–4256.
[10] Cheng, N. G., Lobovsky, M. B., Keating, S. J., Setapen, A. M., Gero, K. I., Hosoi, A. E., et al. 2012. “Design and analysis of a robust, low-cost, highly articulated manipulator enabled by jamming of granular media”, in 2012 IEEE International Conference on Robotics and Automation (Saint Paul, MN: IEEE), 4328–4333.
Citação
Liow L e Howard D (2024) Jellyphant: A Soft, Elephant Trunk-Inspired Robotic Arm That Can Grab Objects. Front. Young Minds. 12:1341887. doi: 10.3389/frym.2024.1341887
Este é um artigo de acesso aberto distribuído sob os termos da Creative Commons Attribution License (CC BY). O uso, distribuição ou reprodução em outros fóruns é permitido, desde que o(s) autor(es) original(is) e o(s) proprietário(s) dos direitos autorais sejam creditados e que a publicação original nesta revista seja citada, de acordo com a prática acadêmica aceita. Não é permitido nenhum uso, distribuição ou reprodução que não esteja em conformidade com estes termos.
Encontrou alguma informação errada neste texto?
Entre em contato conosco pelo e-mail:
parajovens@unesp.br


