Interfaces cérebro-máquina: seu cérebro em ação
Autores
José del R. Millán, Jose M. Carmena
Jovens revisores
Resumo
As interfaces do tipo cérebro-máquina (ICMs) são capazes de transformar pensamentos em ações e sensações em percepções. Por meio desses sistemas, indivíduos com diferentes graus de paralisia podem desempenhar ações como controlar computadores, dirigir cadeiras de rodas ou manipular braços robóticos. Os ICMs têm potencial para melhorar a qualidade de vida de milhões de pessoas que sofrem de lesão na medula espinal, acidente vascular cerebral, esclerose lateral amiotrófica e outras condições incapacitantes graves.
Um sistema de duplo aprendizado
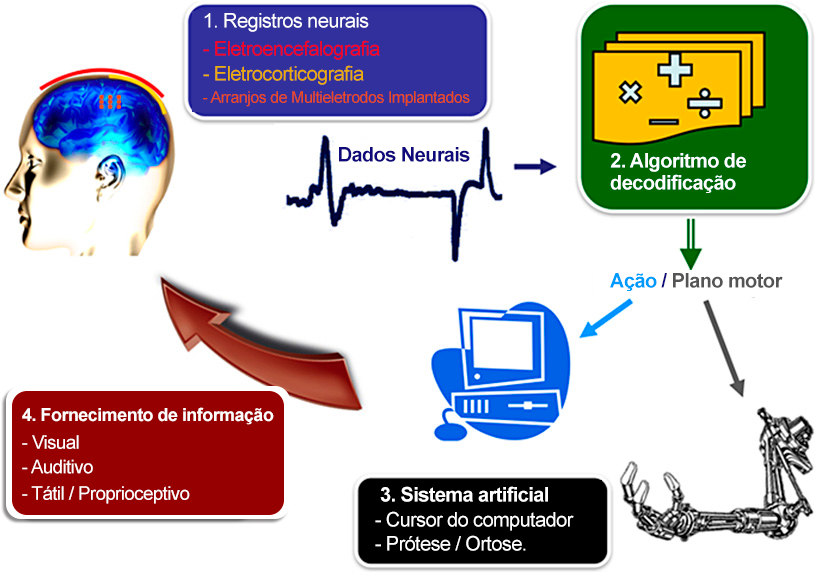
As interfaces do tipo cérebro-máquina (ICMs) ou interfaces cérebro-computador (ICC) são um campo multidisciplinar empolgante que evoluiu tremendamente durante a última década. Em poucas palavras, a ICM consiste em transformar pensamento em ação e sensação em percepção. Em um sistema de ICM, os sinais neurais registrados no cérebro são passados para um algoritmo de decodificação que os traduz em desempenho motor, tal como controlar um cursor de computador, dirigir uma cadeira de rodas ou comandar um braço robótico. Normalmente, um circuito de controle fechado é estabelecido para fornecer ao sujeito informação visual sobre o dispositivo de prótese. Os ICMs têm um tremendo potencial para melhorar a qualidade de vida de milhões de pessoas que sofrem de lesão na medula espinal, acidente vascular cerebral, esclerose lateral amiotrófica e outras condições incapacitantes graves [1].
Um aspecto importante da ICM é a capacidade de distinguir os diferentes padrões de atividade cerebral, cada um associado a uma determinada intenção ou tarefa mental. Assim, a adaptação é um componente-chave de uma ICM porque, de um lado, os usuários devem aprender a controlar sua atividade neural para gerar padrões cerebrais distintos, enquanto, de outro, técnicas de aprendizado de máquina (meios matemáticos para detectar padrões em dados complexos) devem encontrar padrões cerebrais individuais que caracterizam as tarefas mentais executadas pelo usuário. Em suma, a ICM é um sistema de duplo aprendizado.
As interfaces cérebro-máquina atuam em níveis invasivos e não invasivos. As técnicas invasivas requerem cirurgia cerebral para colocar eletrodos diretamente sobre ou no cérebro. Exemplos delas incluem ICMs que usam arranjos múltiplos de eletrodos intracorticais implantados no cérebro e registros de eletrocorticografia (ECoG) obtidos diretamente da superfície exposta do cérebro. Técnicas não-invasivas incluem registros eletroencefalográficos (EEG) do couro cabeludo, ou seja, fora do crânio (Figura 1, caixa 1).
As técnicas de EEG e ECoG medem as flutuações de voltagem resultantes da corrente que flui dentro dos neurônios do cérebro. Ao custo de ser invasivo, o sinal de ECoG tem melhor resolução espacial em milímetros e propriedades sinal-ruído (maior sinal claro) do que o sinal EEG; e os arranjos de múltiplos eletrodos intracorticais são as mais invasivas das três técnicas. Esses eletrodos registram dois tipos diferentes de sinais: a descarga de neurônios individuais (ou seja, picos), conhecida como atividade de unidade única (AUU), e a corrente sináptica somada que flui através do espaço extracelular local em torno de um eletrodo implantado, conhecido como potencial de campo local (PCL).
Pesquisadores que trabalham com sinais de EEG possibilitaram que humanos com deficiência motora severa controlassem mentalmente uma variedade de dispositivos, de teclados a cadeiras de rodas (Figura 2). Algumas pessoas gravemente incapacitadas usam hoje uma ICM baseada em EEG para fins de comunicação. As principais limitações dos sinais EEG são a ampla necessidade de técnicas de aprendizado de máquina e a necessidade de combinar sistemas de interface cérebro-computador (ICC) com projetos e dispositivos de interação inteligentes. Estudos usando sinais da ECoG deram uma prova conceitual promissora para neuropróteses motoras e para a reconstrução da fala a partir do córtex auditivo humano – um passo fundamental para permitir que pessoas falem novamente decodificando a fala imaginada.

Na esfera do registro intracortical (ou seja, o uso de arranjos de eletrodos para registrar a atividade de neurônios individuais), avanços recentes forneceram uma “prova conceitual” que demonstrou a viabilidade teórica da construção de sistemas funcionais de ICM no mundo real. Na verdade, a última década foi pródiga em demonstrações impressionantes de controle neural de dispositivos protéticos por roedores, primatas não humanos e humanos que participaram de ensaios clínicos de fase I. Esse progresso será muito acelerado nos próximos cinco a dez anos e espera-se que leve a um conjunto diversificado de soluções clinicamente viáveis para diferentes condições neurológicas.
Essas abordagens fornecem vantagens complementares, e uma combinação de tecnologias pode ser necessária para alcançar o objetivo final de recuperar a função motora com o ICM em um nível que permita ao paciente realizar tarefas da vida diária sem esforço [4]. Além disso, precisaremos combinar ferramentas práticas de ICM com designs e dispositivos de interação inteligentes a fim de facilitar o uso por longos períodos de tempo e reduzir a carga cognitiva [5]. Assim, o rumo da ICM mudou de “Esse sistema pode ser construído?” para “Como construir sistemas de ICM confiáveis, precisos e robustos que sejam clinicamente viáveis?” Essa questão exigirá abordar os seguintes desafios principais:
O primeiro é projetar interfaces físicas que possam operar permanentemente e durar a vida inteira. O novo hardware abrange desde eletrodos secos de EEG até interfaces neurais biocompatíveis e totalmente implantáveis, incluindo ECoG, PCL e AUU, em várias áreas do cérebro. Um componente essencial de todos eles é a transmissão sem fio e o consumo de energia ultrabaixo. É importante ressaltar que esse novo hardware exige novas soluções de software. O uso contínuo de uma ICM gera, por definição, mudanças plásticas nos circuitos cerebrais. Isso leva a mudanças nos padrões de sinais neurais que codificam as intenções do usuário. A ICM, e o algoritmo de decodificação em particular, ainda terão que evoluir. As técnicas de aprendizado de máquina, que são formas matemáticas avançadas de decodificar sinais do cérebro, terão que rastrear essas transformações de maneira transparente enquanto o usuário operar o dispositivo controlado pelo cérebro. Essa adaptação mútua entre o usuário e a ICM não é simples.
O segundo desafio é decodificar e integrar, no sistema, informações sobre o estado cognitivo do usuário, que são cruciais para a interação volitiva. Isso pode incluir consciência de erros cometidos pelo dispositivo, antecipação de pontos críticos de decisão, lapsos de atenção e fadiga. Isso será imprescindível por reduzir a carga de trabalho cognitiva e facilitar a operação de longo prazo. As informações cognitivas devem ser combinadas com leituras de diversos aspectos do comportamento motor voluntário, desde movimentos contínuos até intenções isoladas (por exemplo, tipos de preensão; início de movimentos), para se alcançar uma operação natural e sem esforço de dispositivos protéticos complexos.
O terceiro grande desafio é fornecer informação sensorial realista que contenha dados táteis e proprioceptivas artificiais, ou seja, a consciência da posição e do movimento da prótese. Esse tipo de informação sensorial pode melhorar o controle da prótese, ao permitir que o usuário sinta o ambiente nos casos em que os aferentes sensoriais naturais se achem comprometidos, seja por meio de outros sentidos ou estimulando o corpo a recuperar a sensação perdida. Embora os esforços atuais foquem principalmente a ampla estimulação elétrica de neurônios em áreas sensoriais do cérebro, novas abordagens optogenéticas (ou seja, ligar e desligar células cerebrais com luz) permitirão uma estimulação mais seletiva de neurônios-alvo.
Em um nível mais periférico, as alternativas são a estimulação elétrica dos nervos periféricos e a estimulação vibrotátil em áreas do corpo onde os pacientes retêm a percepção somatossensorial.
Finalmente, a tecnologia ICM tem um forte potencial como ferramenta para pesquisa em neurociência, pois oferece aos pesquisadores a oportunidade única de controlar diretamente a relação causal entre atividade cerebral, entrada sensorial e saída comportamental [6]. Portanto, essa tecnologia pode fornecer novas ideias sobre a neurobiologia da ação e da percepção.
Referências
[1] Nicolelis, M. A. 2001. “Actions from thoughts.” Nature 409:403–7. DOI: 10.1038/35053191.
[2] Héliot, R. e Carmena, J. M. 2010. “Brain-machine interfaces”, in Encyclopedia of Behavioral Neurosciencie, orgs. G. F. Koob, M. Le Moal e R. F. Thompson, 221–5. Oxford: Academic Press.
[3] Carlson, T. E. e Millán, J. d. R. 2013. “Brain-controlled wheelchairs: a robotic architecture.” IEEE Robot. Automot. Mag. 20:65–73. DOI: 10.1109/MRA. 2012.2229936.
[4] Millán, J. d. R. e Carmena, J. M. 2010. “Invasive or noninvasive: understanding brain-machine interface technology.” IEEE Eng. Med. Biol. Mag. 29:16–22. DOI: 10.1109/MEMB. 2009.935475.
[5] Millán, J. d. R., Rupp, R., Müller-Putz, G. R., Murray-Smith, R., Giugliemma, C., Tangermann, M. et al. 2010. “Combining brain-computer interfaces and assistive technologies: state-of-the-art and challenges.” Front. Neurosci. 4:161. DOI: 10.3389/fnins. 2010.00161.
[6] Carmena, J. M. 2013. “Advances in neuroprosthetic learning and control.” PLoS Biol. 11: e1001561. DOI: 10.1371/journal.pbio. 1001561.
Citação
Carmena, J. e Millán, J. (2013). “Brain-machine interfaces: your brain in action.” Front. Young Minds. 1:7. DOI: 10.3389/frym.2013.00007.
Este é um artigo de acesso aberto distribuído sob os termos da Creative Commons Attribution License (CC BY). O uso, distribuição ou reprodução em outros fóruns é permitido, desde que o(s) autor(es) original(is) e o(s) proprietário(s) dos direitos autorais sejam creditados e que a publicação original nesta revista seja citada, de acordo com a prática acadêmica aceita. Não é permitido nenhum uso, distribuição ou reprodução que não esteja em conformidade com estes termos.
Encontrou alguma informação errada neste texto?
Entre em contato conosco pelo e-mail:
parajovens@unesp.br


