Robôs que podem sobreviver ao desafio da queda dos ovos
Autores
Rebecca Kramer-Bottiglio, William R. Johnson III
Jovens revisores

Resumo
Se você já fez o desafio da queda de ovos, sabe que é difícil construir algo que proteja um ovo frágil de cair no chão e se quebrar. Engenheiros estão construindo robôs flexíveis chamados robôs de tensegridade, projetados para sobreviver a colisões violentas. A palavra tensegridade vem de “tensão” e “integridade”. Significa que o robô é feito de barras rígidas unidas por cabos elásticos. Essa estrutura flexível ajuda o robô a absorver o impacto de colisões. Um dia, esses robôs poderão ser usados para explorar lugares perigosos, como cavernas profundas ou outros planetas. Esses robôs podem cair de penhascos ou em crateras. Atualmente, engenheiros estão tornando os robôs de tensegridade melhores e mais fáceis de controlar. Neste artigo, explicaremos como esses robôs funcionam. Discutiremos suas vantagens, desvantagens e para que podem ser usados.
Os robôs de tensegridade são inspirados na arte
Setenta anos atrás, um artista chamado Kenneth Snelson começou a construir as interessantes esculturas que você vê na Figura 1 [1]. Essas esculturas têm barras rígidas amarradas por cabos apertados. Os cabos fazem com que pareça que as barras estão flutuando. O professor de Snelson foi um arquiteto chamado Buckminster Fuller. Fuller chamou essas esculturas flutuantes de “tensegridade”.
Essa palavra combina tensão (uma força de tração que deixa as coisas apertadas quando você as puxa, como cordas, cordas, cordas e cabos) e integridade (uma estrutura com muitas partes que são presas e permanecem juntas). Tensão significa que os cabos estão apertados. Integridade significa que a escultura permanece unida. Fuller e outros arquitetos notaram que as esculturas de tensegridade são úteis. Elas podem ser usadas para construir estruturas como um telhado ou uma ponte. Uma tensegridade é principalmente espaço vazio. Estruturas construídas com tensegridade podem ser mais leves e até mesmo custar menos dinheiro.
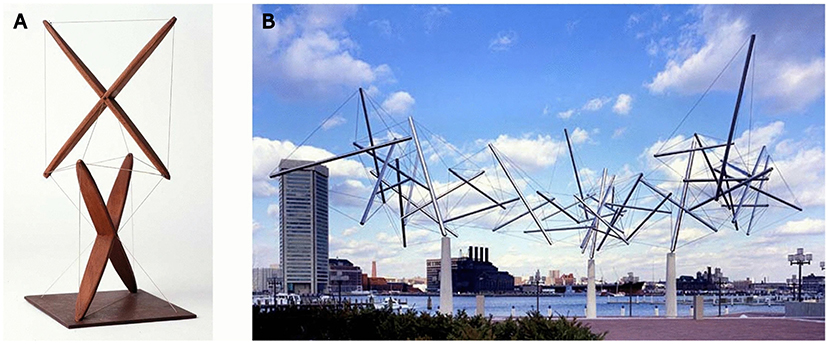
(A) Peça em X de 1948. (B) Pouso fácil em Baltimore de 1977.
Muitos anos depois, engenheiros começaram a construir robôs de tensegridade (Figura 2) [3]. Os robôs de tensegridade não se parecem com robôs comuns. Em vez disso, são feitos de barras rígidas e cabos firmes, assim como as esculturas de tensegridades. Esses robôs possuem as mesmas vantagens: são leves, flexíveis e compostos basicamente de espaço vazio. É possível até mesmo dobrar robôs de tensegridade para que sejam fáceis de enviar para lugares distantes, como outros planetas.
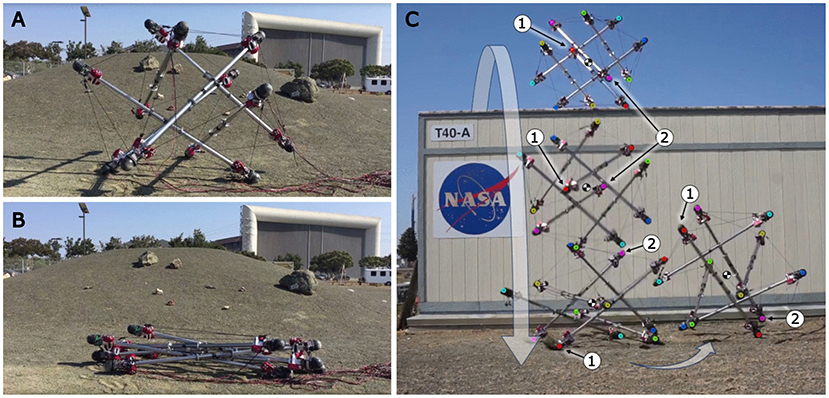
(B) Ele pode se compactar e ficar plano. (C) Ele também pode sobreviver a uma queda de um telhado. Os engenheiros da NASA construíram o SUPERball para explorar outros planetas. Reproduzido com permissão de “Design of SUPERball v2, a compliant tensegrity robot for absorbing large impacts” [2].
Há mais uma grande vantagem nos robôs de tensegridade: eles podem sobreviver a quedas de um penhasco! Quando um robô de tensegridade cai no chão, seu formato se deforma para absorver o impacto. Você pode entender como isso acontece se já pulou em uma cama elástica. Não dói cair em uma cama elástica porque ela é flexível e se deforma quando você pousa nela — ao contrário de cair no cimento! Os robôs de tensegridade também são flexíveis como camas elásticas, então eles absorvem a energia dos impactos.
Engenheiros da NASA estão animados para construir robôs de tensegridade por essa razão [2]. Eles desejam fazer robôs de tensegridade que possam pousar em outros planetas, ou que possam rolar em crateras para explorar o fundo. Assista a um vídeo do robô tensegridade da NASA aqui [2].
Os futuros robôs de tensegridade terão que proteger os instrumentos científicos que carregam. Isso é ainda mais difícil do que o desafio da queda de ovos. Tente projetar algo para proteger um ovo quando ele cair de muito alto! Após sobreviver à queda, o robô de tensegridade precisa explorar os arredores. Mas como podemos construir robôs de tensegridade e fazê-los se mover?
Como podemos movimentar os robôs de tensegridade?
Se você ficar na ponta dos pés e se inclinar para a frente, cairá. Você pode se surpreender ao saber que é assim que os robôs de tensegridade se movem!
Quando você está em pé normalmente, seu centro de gravidade está diretamente acima dos seus pés. Mesmo que você se incline um pouco para a frente, seu centro de gravidade ainda estará acima dos seus pés, então você não cairá. Quando você fica na ponta dos pés, a área de apoio dos seus pés é menor, então inclinar-se para a frente, mesmo que seja só um pouco, pode fazer você cair.
Em vez de pés, os robôs de tensegridade têm uma estrutura chamada polígono de estabilidade como sua face inferior. Quando um robô de tensegridade encolhe seu polígono de estabilidade, é como ficar na ponta dos pés. Então, o robô pode deformar sua forma e cair, ou rolar, empurrando seu centro de gravidade para fora do seu polígono de estabilidade. O robô de tensegridade pode continuar rolando, caindo novamente na próxima face.
Outros robôs de tensegridade usam estratégias diferentes para locomoção. Além de rolar, alguns robôs de tensegridade rastejam, saltam, vibram e até nadam. A maioria dos robôs tensegridade se move usando motores elétricos para tornar seus cabos mais longos ou mais curtos. Outros robôs de tensegridade usam atuadores infláveis (atuador é a parte do robô que o faz se mover, como um motor para fazer seus corpos se deformarem). Assista a este vídeo para ver um robô tensegridade rastejando com atuadores infláveis [4]. Há muita variedade quando se trata de robôs de tensegridade, o que os torna legais e interessantes para estudar. Mas pode ser difícil projetar um novo robô de tensegridade porque há muitas escolhas a serem feitas.
Simulações nos ajudam a projetar e controlar robôs de tensegridade
Construir robôs pode custar muito dinheiro. Às vezes, não sabemos que tipo de robô construir para uma tarefa. Mesmo quando sabemos, podemos não saber como fazê-lo se mover. É fácil entender a locomoção de um carro — gire as rodas para avançar e gire a direção para virar. Ao contrário de um carro, a locomoção de tensegridade não é óbvia. Quais cabos o robô deve puxar para avançar ou virar? Engenheiros resolvem esses problemas fazendo simulações em um computador. Uma simulação é como um videogame. Em um videogame, você pode controlar um personagem, fazendo-o correr e pular. O jogo calcula onde você pousa usando física e matemática. As simulações fazem a mesma coisa, mas para robôs. As simulações preveem o que um robô fará quando lhe damos algumas instruções, o que nos ajuda a descobrir os melhores controles. A simulação também pode nos dizer o quão bom um robô será antes de construí-lo.
Podemos fazer simulações com vários robôs tensegritários diferentes. Esses robôs podem ter diferentes números de barras, diferentes formatos e tamanhos. Então, podemos comparar suas velocidades, ou outra propriedade para escolher qual robô é o melhor. Podemos até usar a simulação para descobrir a melhor estratégia de locomoção. Assim como você pode correr, andar, rastejar e nadar, os robôs tensegritários têm diferentes maneiras de se mover. A melhor maneira de se mover depende do ambiente. As simulações nos dizem se um determinado robô tensegritário pode rolar ou rastejar, e também nos dizem quais cabos ele precisa puxar para se mover de uma determinada maneira. Neste vídeo, usamos uma simulação para aprender como controlar um robô tensegritário de 3 barras [5].
É difícil fazer simulações de robôs de tensegridade porque esses robôs são flexíveis, o que torna mais complicado prever o que eles farão. Além disso, quando um robô de tensegridade puxa um cabo para torná-lo mais curto, isso afetará todos os outros cabos na tensegridade.
Mesmo com esses desafios, os pesquisadores continuam fazendo simulações melhores para esses robôs [5]. Não importa o quanto tentemos, nunca simularemos um robô perfeitamente. Esse problema é chamado de lacuna sim2real – uma expressão em inglês que se refere à “lacuna entre a simulação e a realidade” para apontar as pequenas (ou grandes) diferenças entre as simulações e o mundo real.
Nenhuma simulação pode ser perfeita, então sempre haverá uma lacuna entre a simulação e a realidade. Há muitas coisas no mundo real que são difíceis de medir com precisão. Mesmo se pudéssemos, o mundo real tem alguma aleatoriedade que é impossível de prever. Simulações são úteis para descobrir como projetar e controlar robôs de tensegridade. Ainda assim, sempre devemos construir o robô real e testá-lo para verificar a simulação. Então, podemos ficar felizes se nossa simulação for precisa!
Os robôs de tensegridade no futuro
Quando Kenneth Snelson criava esculturas artísticas há 70 anos, ele não sabia que seu trabalho poderia levar a robôs que explorassem outros planetas. Hoje, os engenheiros continuam projetando robôs de tensegridade novos e melhores. Um dia, robôs de tensegridade poderão vasculhar cavernas subterrâneas [6] ou o fundo de crateras (Figura 3). Eles poderão fazer outras coisas que nem sequer imaginamos. Ninguém imaginava que a arte se tornaria um robô um dia! Ainda há problemas a serem resolvidos, no entanto. Robôs de tensegridade podem ser difíceis de projetar, simular e controlar e ainda não são tão confiáveis quanto robôs com rodas ou mesmo pernas. Mais pesquisas são necessárias para que robôs de tensegridade alcancem seu potencial máximo. Talvez você seja a pessoa certa para resolver esses problemas!
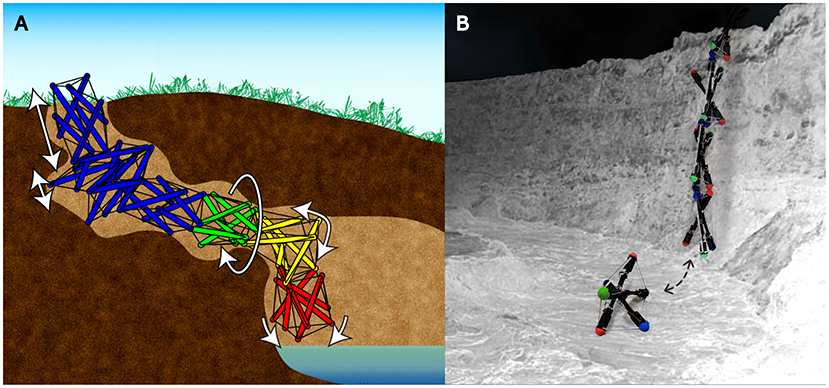
(A) Engenheiros no Japão estão construindo robôs de tensegridade para explorar cavernas subterrâneas. Reproduzido com permissão de “large torsion thin artificial muscles tensegrity structure for twist manipulation” [6]. (B) Acreditamos que robôs tensegríticos também explorarão crateras em outros planetas.
Glossário
Tensão: Uma força de tração que torna as coisas apertadas quando você as puxa, como cordas, fios e cabos.
Integridade: Uma estrutura com muitas partes que são conectadas e permanecem juntas.
Desafio da Queda do Ovo: Uma atividade que as crianças fazem em algumas escolas e acampamentos de verão. Projete algo para proteger um ovo quando ele cair de uma altura muito alta.
Centro de Gravidade: O ponto do seu corpo onde a gravidade da Terra o puxa. Em cálculos de física, este ponto pode ser considerado onde todo o seu peso está localizado.
Locomoção: Um robô ou outra máquina se movendo de um lugar para outro.
Atuador: A parte do robô que o faz se mover, como um motor.
Simulação: Um programa de computador que usa física ou dados para prever como um robô se moverá.
Lacuna Sim2real: As pequenas (ou grandes) diferenças entre simulações e o mundo real. Nenhuma simulação pode ser perfeita, portanto, sempre haverá uma lacuna entre a simulação e a realidade.
Referências
[1] Micheletti, A., e Podio-Guidugli, P. 2022. Seventy years of tensegrities (and counting). Arch. Appl. Mechan. 92:2525–48. doi: 10.1007/s00419-022-02192-4
[2] Vespignani, M., Friesen, J. M., SunSpiral, V., e Bruce, J. 2018. “Design of superball v2, a compliant tensegrity robot for absorbing large impacts”, in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Madrid: IEEE), 2865–71.
[3] Shah, D. S., Booth, J. W., Baines, R. L., Wang, K., Vespignani, M., Bekris, K., et al. 2022. Tensegrity robotics. Soft Robot. 9:639–56. doi: 10.1089/soro.2020.0170
[4] Kobayashi, R., Nabae, H., Endo, G., e Suzumori, K. 2022. Soft tensegrity robot driven by thin artificial muscles for the exploration of unknown spatial configurations. IEEE Robot. Automat. Lett. 7:5349–56. doi: 10.1109/LRA.2022.3153700
[5] Wang, K., Johnson, W.R., Lu, S., Huang, X., Booth, J., Kramer-Bottiglio, R., et al. 2023. “Real2sim2real transfer for control of cable-driven robots via a differentiable physics engine”, in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Detroit: IEEE), 2534–41.
[6] Kobayashi, R., Nabae, H. e Suzumori, K., 2023. Large torsion thin artificial muscles tensegrity structure for twist manipulation. IEEE Robot. Automat. Lett. 8:1207–14. doi: 10.1109/LRA.2023.3236889
Citação
Johnson III WR e Kramer-Bottiglio R (2024) Robots that Can Survive the Egg Drop. Front. Young Minds. 12:1452937. doi: 10.3389/frym.2024.1452937
Este é um artigo de acesso aberto distribuído sob os termos da Creative Commons Attribution License (CC BY). O uso, distribuição ou reprodução em outros fóruns é permitido, desde que o(s) autor(es) original(is) e o(s) proprietário(s) dos direitos autorais sejam creditados e que a publicação original nesta revista seja citada, de acordo com a prática acadêmica aceita. Não é permitido nenhum uso, distribuição ou reprodução que não esteja em conformidade com estes termos.
Encontrou alguma informação errada neste texto?
Entre em contato conosco pelo e-mail:
parajovens@unesp.br